04. Initialization
Initialization
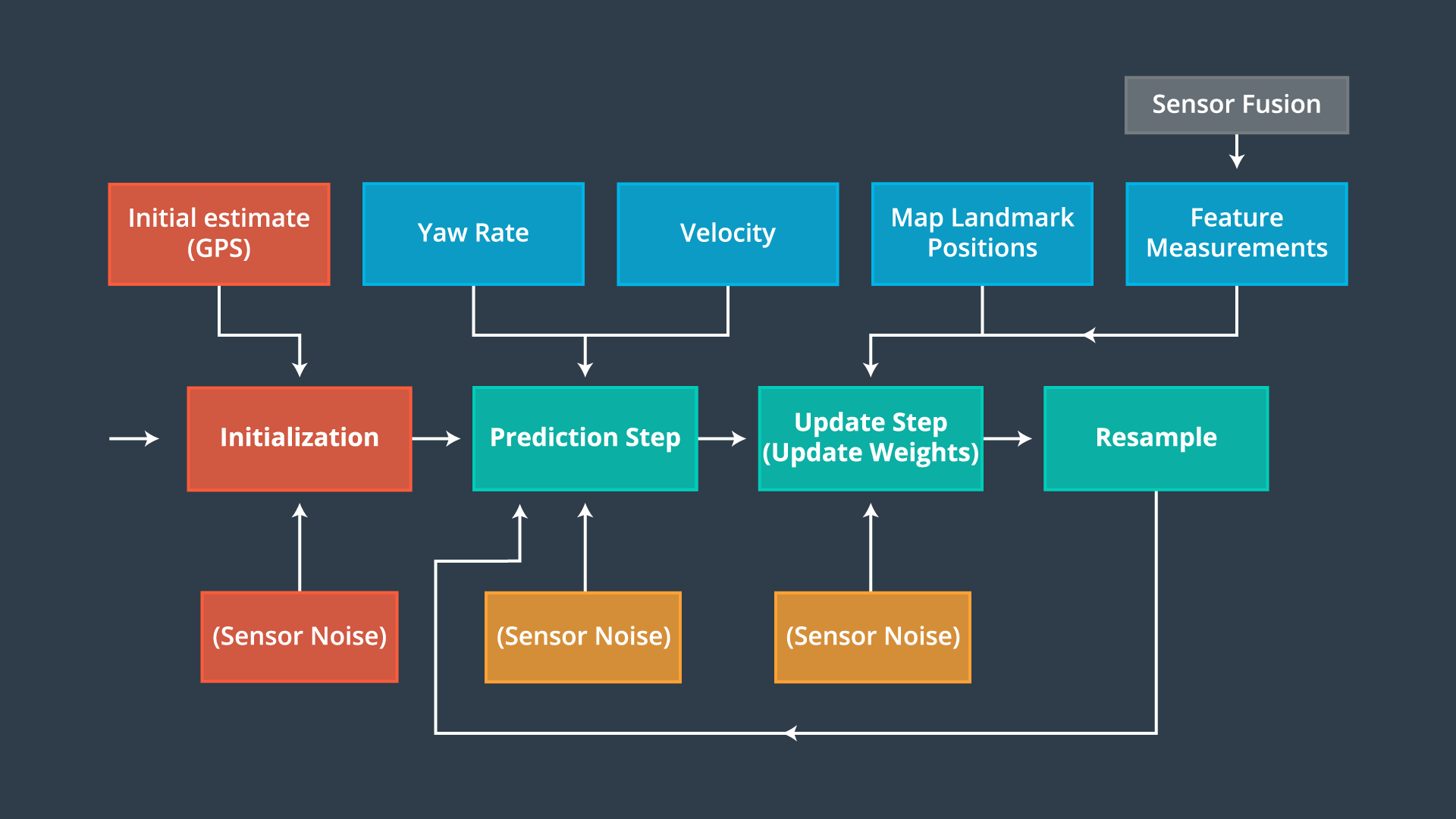
The most practical way to initialize our particles and generate real time output, is to make an initial estimate using GPS input. As with all sensor based operations, this step is impacted by noise.
Project Implementation
- Particles shall be implemented by sampling a Gaussian distribution, taking into account Gaussian sensor noise around the initial GPS position and heading estimates.
- Use the C++ standard library normal distribution and C++ standard library random engine functions to sample positions around GPS measurements.